


















































科聪·具身纪②
在智能机器人高速发展的浪潮中,科聪正式官宣进军具身智能产业,全面发力机器人关键核心部件研发。
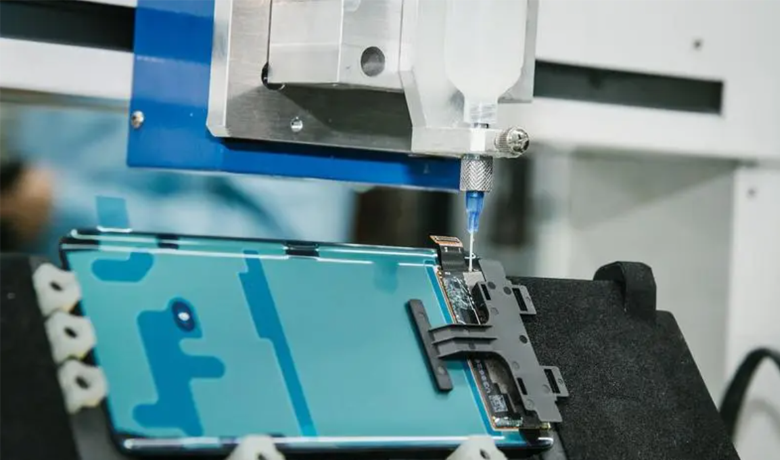
作为继足式机器人控制器的第二力作,科聪重磅推出JRD系列机器人关节模组,其中首款产品JRD2100-T一经亮相,便凭借其高集成度、高性能表现,赢得众多制造商的广泛认可。
未来,科聪将持续推出更多具身智能核心产品,不断为行业注入源源不断的新动能。
高度集成·极致精巧
JRD2100-T采用一体化高度集成设计,将减速器、电机与电机驱动器深度融合,各模块结构紧凑、安装拆卸方便,大大提升整机装配效率与系统可靠性。

更值得一提的是,该模组专为手肘、手臂、肩膀等关键动作关节打造,模块化配置让机器人动力系统更加灵活多变,赋能更丰富的动作表达。

智能控制·精准协同
通过双编码器闭环控制系统,实现速度环、力矩环、位置环及MIT混合控制,确保每一次运动都“心随意动”。
同时,支持CANFD高速通讯协议,实现多模组间实时协同,高效运行无压力。
多重安全保护机制包括:过流、过压、欠压、超速、过温等监控,保障设备在各类极限工况下依然稳定如初。

技术亮点·一目了然
01.中空走线设计:走线更灵活,结构更美观
02.集中式绕组工艺:提升槽满率与转矩密度,进一步释放动力潜能
03.经典分数槽与最优极槽配合设计:有效降低齿槽转矩幅值与波动,保障运转平顺
04.行星减速器驱动:高承载、高寿命,精密稳定
05.高集成FOC驱动方案:高效节能,响应迅捷
06.高精度多圈绝对值编码器:毫米级定位精度
07.体积小巧,重量轻盈:更适合人形与协作机器人
08.低噪音、低晃动运行:适配复杂、静音环境

参数信息
| 减速比 | 36 | 额定电压 | 48 V |
| 额定相电流 | 3.8 A | 额定功率 | 135 W |
| 额定转速 | 77 RPM | 额定扭矩 | 12 Nm |
| 峰值转速 | 87 RPM | 峰值相电流 | 12 A |
| 峰值扭矩 | 36 Nm | 电机平均效率 | 72% |
| 扭矩常数 | 2.8 Nm/A | 减速器背隙 | 8 Arcmin |
| 通信方式 | CAN FD | 通信波特率 | 500K-5M |
| 编码器 | 双编21位 | - | - |

未来可期·立即行动
JRD系列将持续拓展产品矩阵,覆盖更多关节类型,全面支持新一代具身智能机器人在医疗康复、工业协作、教育服务等多个场景中的深度落地。


