






















































方案简介
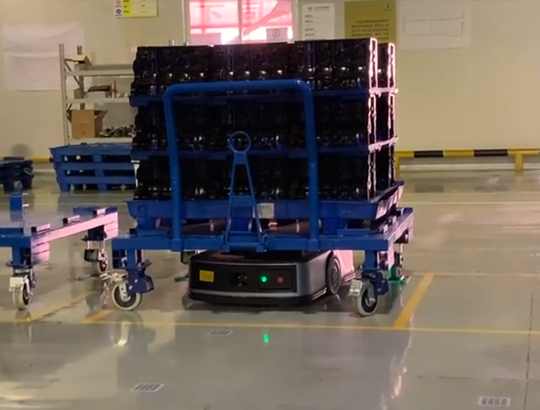
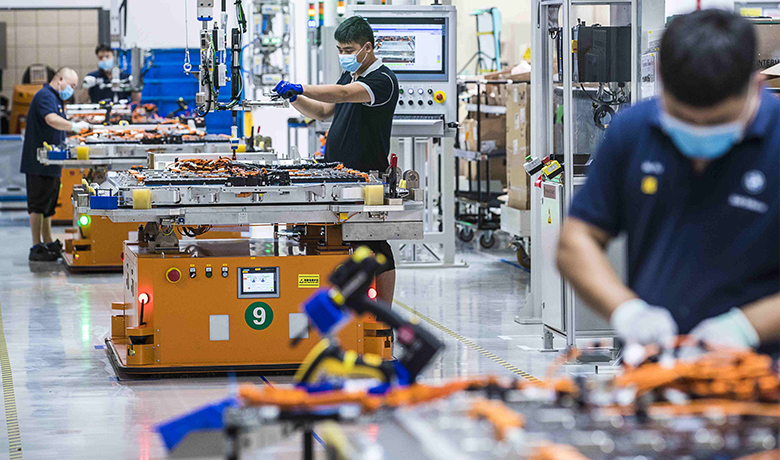
叉式搬运移动机器人适用于对不同高度的成件托盘货物进行装卸、堆垛和运输等自动作业,无需额外特殊载具,即可完成接泊托盘货物所需的升降、承载和搬运等一系列动作,以实现工厂车间的少人化、无人化物流。
叉式搬运移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。
叉式搬运移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。
方案构成

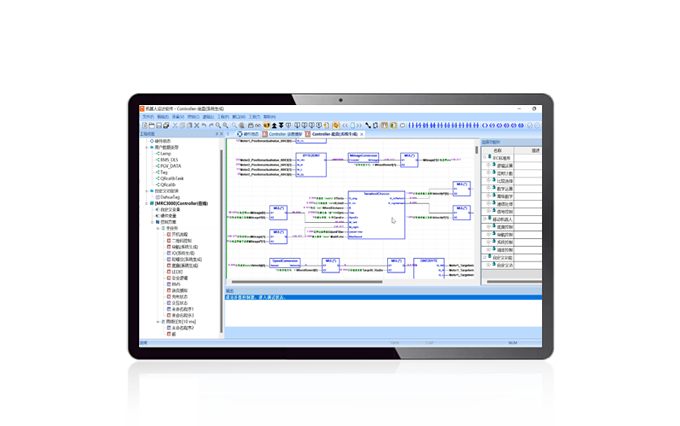
通用移动机器人控制器

叉式移动机器人控制器


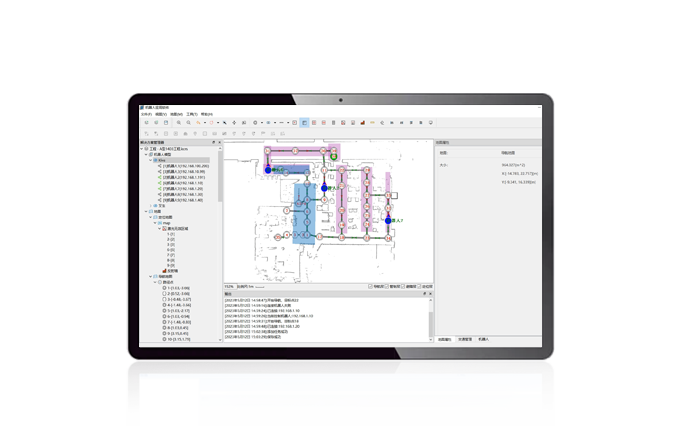
2D激光扫描测距仪
3D激光传感器

磁导航传感器

磁导航传感器

RFID传感器
舵轮

伺服电机

伺服电机

伺服驱动器

伺服驱动器

伺服驱动器

叉齿

编码器转接模块
拉绳编码器

绝对值编码器

拉绳编码器


避障激光传感器

激光障碍物传感器

双目摄像头

有线手操器

呼叫器模块

车载显示屏

手持终端


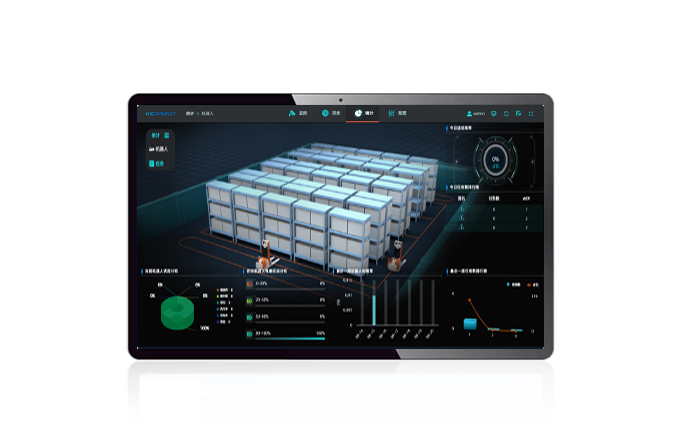
无线客户端


视觉模块

视觉传感器

深度相机

© 2023 浙江科聪控制技术有限公司官网 | 让移动机器人服务人类 浙公网安备 33052302000842号 浙ICP备20017983号-1 sitemap.xml