























































JRC3000
四足机器人控制器
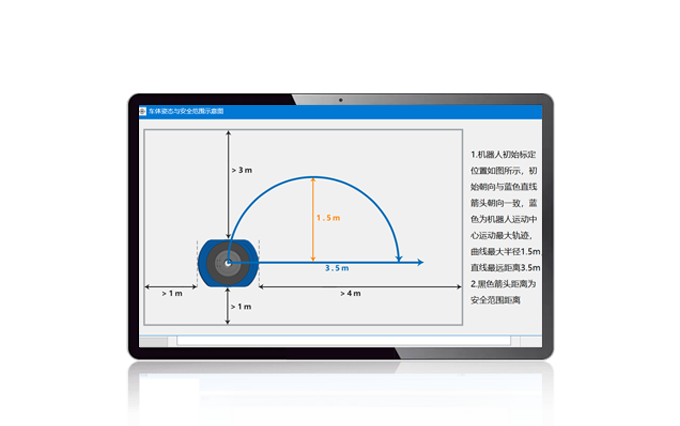
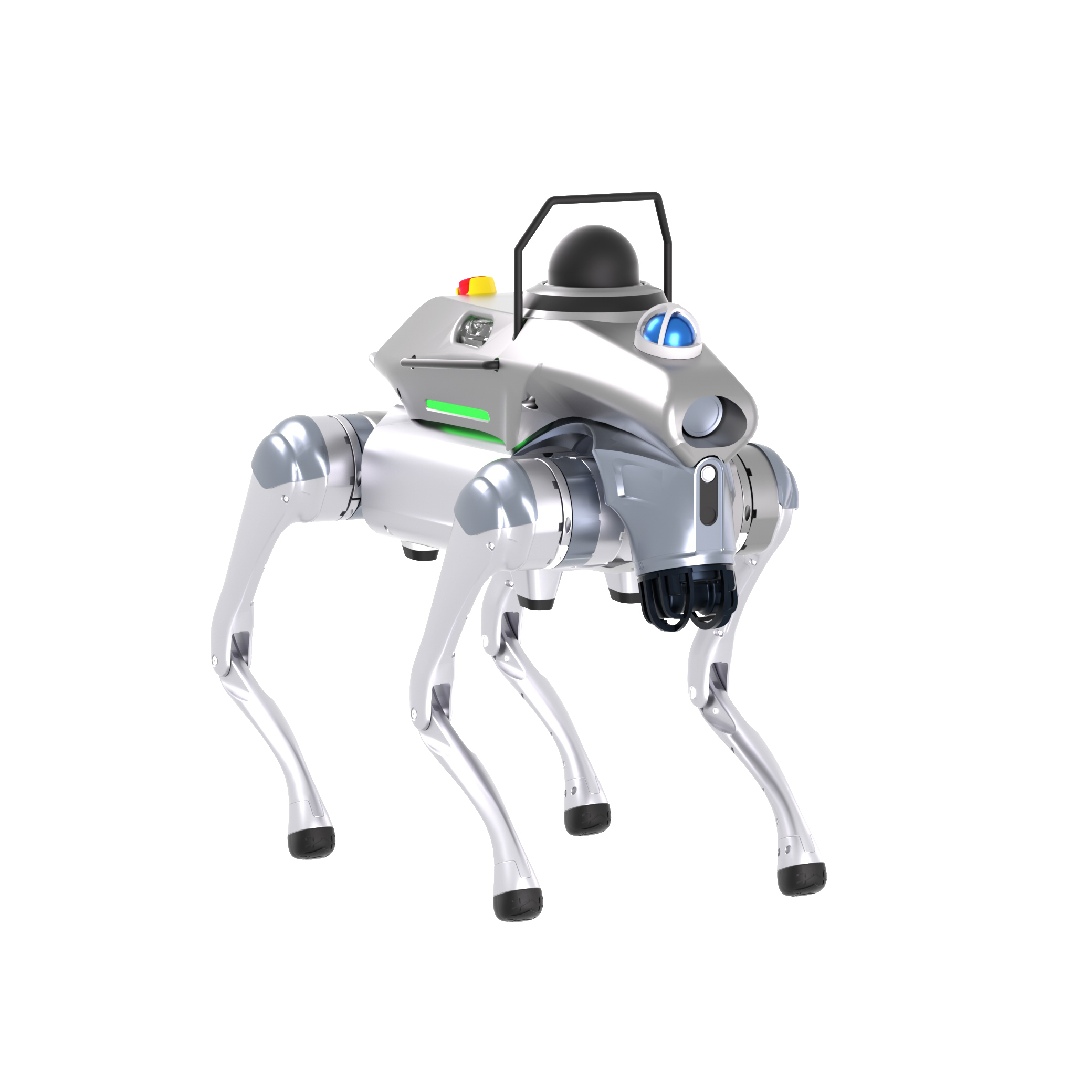
四足机器人控制器是适用于四足机器人的一款专用控制器,集成3D SLAM和GNSS RTK 紧耦合算法,使其在室内外以及空旷场景下实现高精度定位与自主导航移动功能,能够精准调控机器人在复杂地形下的行走姿态与动作,无论是攀爬、跨越障碍还是在狭窄空间移动。通过图形化编程实现二次开发,快速接入气体检测等传感器,数据上传云平台。兼容宇树、云深处等主流四足机器人本体,集成SDK实现即装即用快速部署,同时支持自动跨楼层作业。



基本参数
型号 | JRC3000 |
名称 | 四足机器人控制器 |
尺寸 W x H x D(mm) | 190×100×39(不含接插件触头) |
防护等级 | IP65 |
供电电源 | (18~36)VDC |
温度 | -30℃~+70℃ |
湿度 | 10%~95%RH,无凝露 |
有线以太网 | 3 |
无线调试接口 | 1 |
导航方式 | 3D激光导航、GNSS导航、融合导航 |
地图面积 | ≤1,000,000㎡ |
DI/DO/DIO | 14/8/4 |
CAN(通道) | 3 |
RS485(通道) | 3 |
复用通信口(通道) | 1(可配RS232/RS485/CAN) |


© 2023 浙江科聪控制技术有限公司官网 | 让移动机器人服务人类 浙公网安备 33052302000842号 浙ICP备20017983号-1 sitemap.xml