
























































推荐适用类型

叉式

潜伏顶升式

背负式

协作式

辊筒式

料箱式
麦轮式

牵引式
停车式

室外型
基本参数
型号 | MSC5000 | |
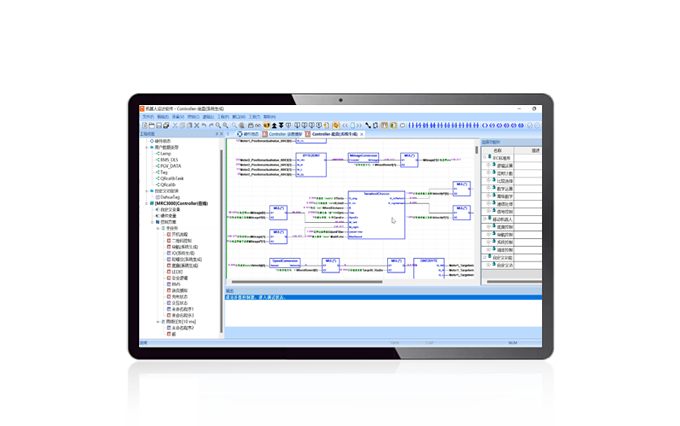
名称 | 名称 | 安全移动机器人控制器 |
外形尺寸 | 尺寸 W x H x D(mm) | 125×215×56(不含接插件触头) |
安全认证 | 安全完整性等级 | IEC 61508 SIL3,SC3 IEC 62061 SIL3 |
安全性能等级 | ISO 13849 Cat 3,PLe | |
安全架构 | 安全架构 | 1oo2 |
产品认证 | CE | EMC(EN IEC 61326-1) LVD(IEC 61010-1、IEC 61010-2) |
防护等级 | IP65 | |
工作环境 | 温度 | -30℃~+70℃ |
湿度 | 10%~95%RH,无凝露 | |
海拔 | 2000m以下 | |
EMC | 工业三级 | |
网络接口 | 有限工业以太网 | 5 |
安全接口 | SO | 4(24V/1.5A) |
DIO | 36 | |
编码器接口 | 2 | |
供电电源 | 24VDC | |
通用接口 | DI/DO/DIO | 8/4/4 |
编码器接口 | 2 | |
CAN(通道) | 3 | |
RS485(通道) | 2 | |
复用通信口(通道) | 1(可配CAN/RS485/RS232) | |
供电电源 | (18~60)VDC | |
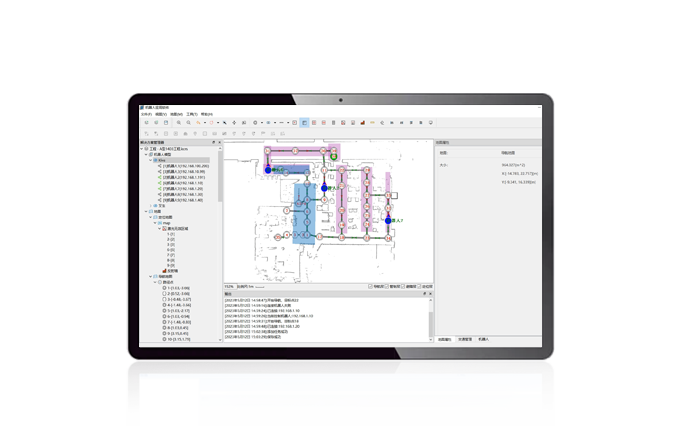
导航性能 | 导航方式 | 2D/3D激光导航、二维码导航、磁导航、GNSS导航 |
导航精度 | ±5mm,±0.5° | |
底盘运动模型 | 两驱差速、四驱差速、单舵轮、双舵轮、四舵轮、差速总成、麦克纳姆轮、阿克曼底盘等 | |
地图面积 | ≤1,000,000 m² | |

相关解决方案

堆高叉式/前移叉式
叉式搬运移动机器人适用于对不同高度的成件托盘货物进行装卸、堆垛和运输等自动作业,无需额外特殊载具,即可完成接泊托盘货物所需的升降、承载和搬运等一系列动作,以实现工厂车间的少人化、无人化物流。
叉式搬运移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。
查看详情
叉式搬运移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。

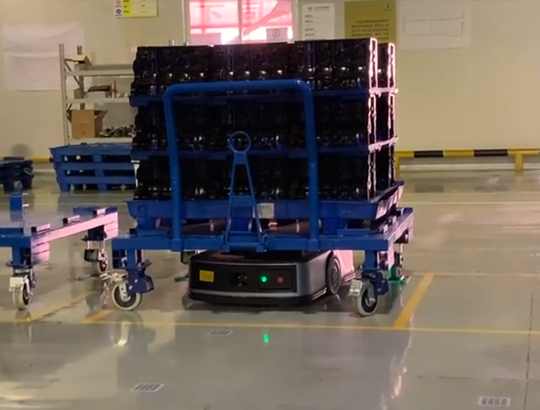
潜伏顶升式
潜伏顶升式移动机器人通过顶升方式搬运托盘、货架等载具,将运输的物料、货架举升并快速平稳运送至指定位置,完成仓储厂房车间的货架调配、分拣、整合等工作,自动对接移栽机构、升降机构、立库等设备,达到无人化。
潜伏顶升式整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。
查看详情
潜伏顶升式整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。

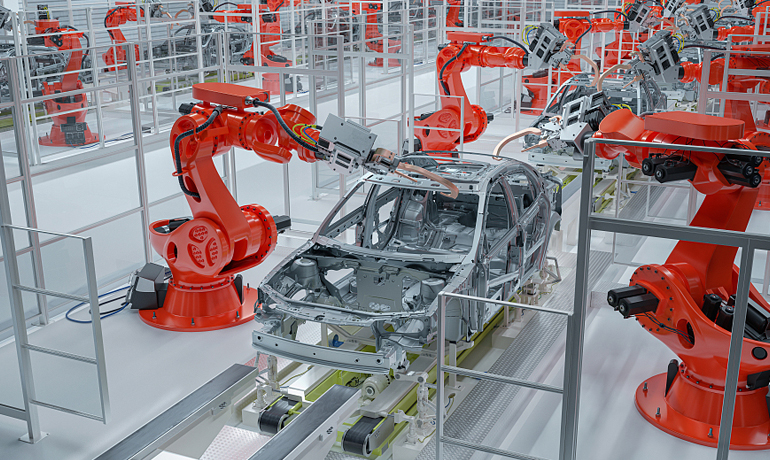
协作(复合)式
协作(复合)移动机器人在无人搬运底盘基础上增加机械臂,形成协作AGV,可完成物料在移动机器人与设备机台间的上下料工作,也可通过机械臂上的视觉传感器对物料进行全方位检测。
协作(复合)移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。
查看详情
协作(复合)移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。

辊筒式
辊筒式移动机器人是在无人搬运底盘基础上增加辊筒机构,形成产线对接机器人,可以实现车间与仓库、产线与产线、生产设备与生产设备之间的无缝连接。
辊筒式移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。
查看详情
辊筒式移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。

料箱式
多层料箱机器人是一款智能化物流搬运设备,可实现多个料箱的智能拣选、存取、搬运。无需借助任何轨道,可前进、后退、转弯,具有自主导航、主动避障和自动充电等功能。
料箱式移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。
查看详情
料箱式移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。

牵引式
牵引式移动机器人采用尾部拉钩牵引物料小车,可同时牵引多辆物料车实现高效搬运,提高运输效率。适用于生产车间物料车的转运、物料车到工位间的运送等。
牵引式移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、安全检测、交互模块、通讯模块、供电单元、选增功能等单元模块构成。
查看详情
牵引式移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、安全检测、交互模块、通讯模块、供电单元、选增功能等单元模块构成。

重载式
重载型移动机器人,是一种以电池或内燃机作为动力、配备大功率电机、减速机及万向驱动轮实现灵活运行,具有车速调节、升降补偿、车辆制动、全方位转向、自由路径规划、自动引导、在线快速充电、多车编组联动等功能, 同时可被集中调度管理的智能车辆。
重载型移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、安全检测、交互模块、通讯模块、供电单元、选增功能等单元模块构成。
查看详情
重载型移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、安全检测、交互模块、通讯模块、供电单元、选增功能等单元模块构成。

© 2023 浙江科聪控制技术有限公司官网 | 让移动机器人服务人类 浙公网安备 33052302000842号 浙ICP备20017983号-1 sitemap.xml