



















































方案简介
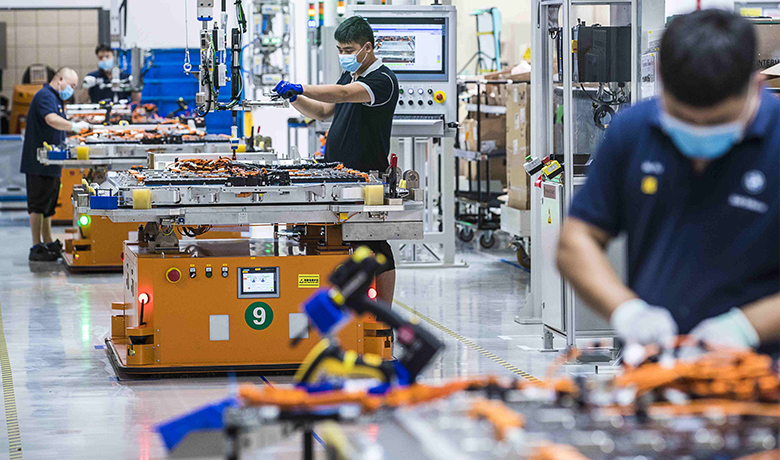
室外型移动机器人在室外进行搬运,一般使用四轮四转向底盘。
室外型移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、安全检测、交互模块、通讯模块、供电单元、选增功能等单元模块构成。
室外型移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、安全检测、交互模块、通讯模块、供电单元、选增功能等单元模块构成。
方案构成


通用移动机器人控制器

底速无人驾驶控制器


GNSS套件
3D激光


驱动器

驱动器

驱动器

避障激光

避障激光

避障激光


车载显示屏

灯光

开关


无线客户端
电池

电池
相关案例

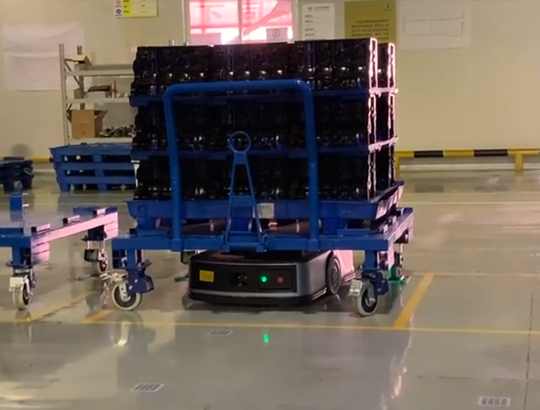
室外负载式移动机器人
导航方式: 激光导航+GNSS
导航底盘方式:四舵轮
导航精度: 土10mm
导航底盘方式:四舵轮
导航精度: 土10mm

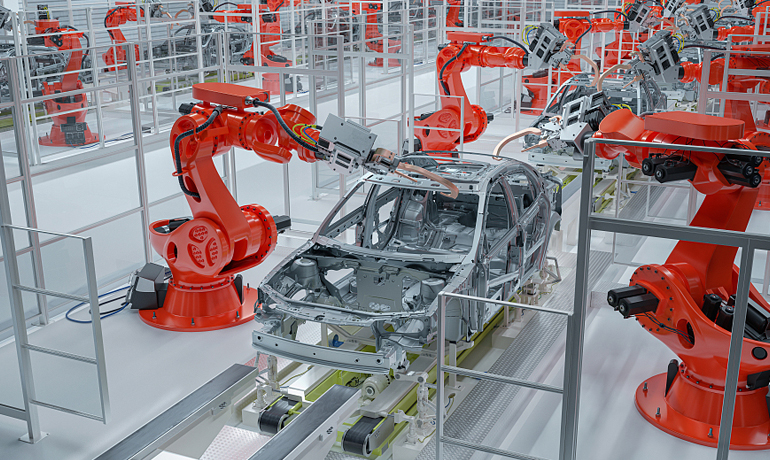
农业移动机器人
导航方式:GNSS导航
底盘方式:四轮四转向
导航精度:±10cm
底盘方式:四轮四转向
导航精度:±10cm

无人驾驶压路机
导航方式:GNSS
导航底盘方式:铰链式
导航精度: 土5cm
导航底盘方式:铰链式
导航精度: 土5cm

无人驾驶清扫车
导航方式: GNSS
导航底盘方式:阿克曼
导航精度: 土5cm
导航底盘方式:阿克曼
导航精度: 土5cm

© 2023 浙江科聪控制技术有限公司官网 | 让移动机器人服务人类 浙公网安备 33052302000842号 浙ICP备20017983号-1 sitemap.xml