






















































随着移动机器人在千行百业的应用,其面向的使用者愈发广泛,使用者对移动机器人设计软件的使用习惯和需求也越来越多样化。
专业工程师期望能通过自主编程实现更多深度功能和个性化需求。
新手用户希望能有简洁易操作的设计软件,满足现阶段的功能需求。
解码用户痛点
INDUSTRY PAIN POINT
▌新手用户
① 增加学习成本:
专业设计软件复杂性高,对于未接受过系统编程学习的新手用户而言,需花大量时间、精力学习使用。
②操作流程复杂:
新手用户难以准确设计流程和确定节拍,易出错,从而在工作中效率不高。
▌专业工程师
① 无法满足深度编程需求:
简单的设计软件因编程功能不足,使得专业工程师在进行深度编程时受到限制,无法满足他们的个性化需求。
② 降低工作效率:
出现复杂业务场景时,简单的设计软件无法有效应对,往往需要反馈厂家进行解决, 这大大增加了项目的时效性和沟通成本。
新手易用,专业深耕
CONVENIENT AND PROFESSIONAL
基于新手用户和专业工程师的不同需求和痛点,浙江科聪开发推出了”机器人模型组态向导”软件,与原有的二次开发控制系统平台(IEC61131-3标准)联动,真正做到易用与专业的完美融合。

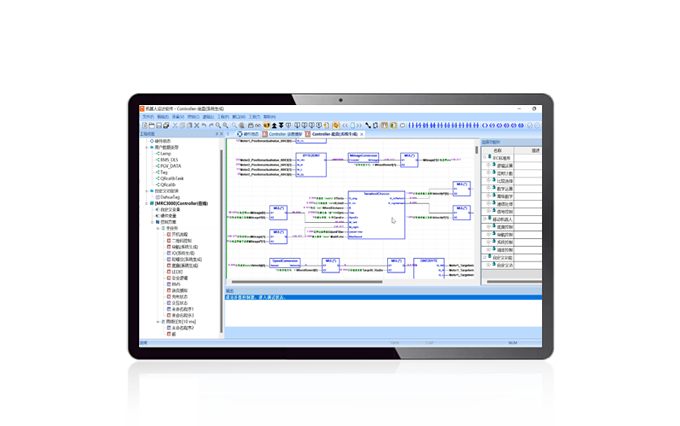
▌二次开发控制系统平台
符合IEC标准的二次开发控制系统平台,除了各类功能块,支持ST、LD、FBD开发方式外,还保留低代码自由开发能力,第三方设备接入、机器人电气逻辑、安全功能、工装功能等自由定义开发。
▌机器人模型组态向导
车型选择、底盘配置、通讯协议等各项功能配置,都可快速且简单的实现,更有云端功能,方便数据存储与共享,直观呈现与精准决策两不误。
科聪“机器人模型组态向导”软件
KC ROBOT MODEL SOFTWARE
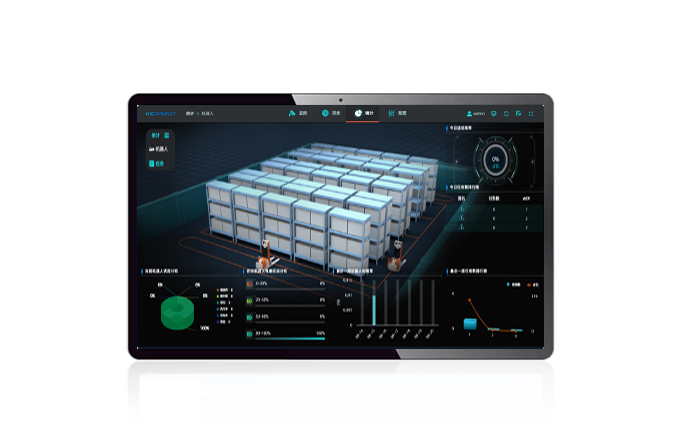
▌云端功能——更高效便捷
可实现配置文件的上传、下载功能,同时也可与多家厂商移动机器人模型进行联动。用户可以随时随地进行文件的共享和管理,实现了跨设备、跨平台的无缝协作,极大地提高了工作效率和便捷性。

▌海量 variable 类型——更省心省力
提供海量的variable 类型参数,可通过读取 variable.xml 选择变量,让用户能够根据自身需求进行个性化的选择。

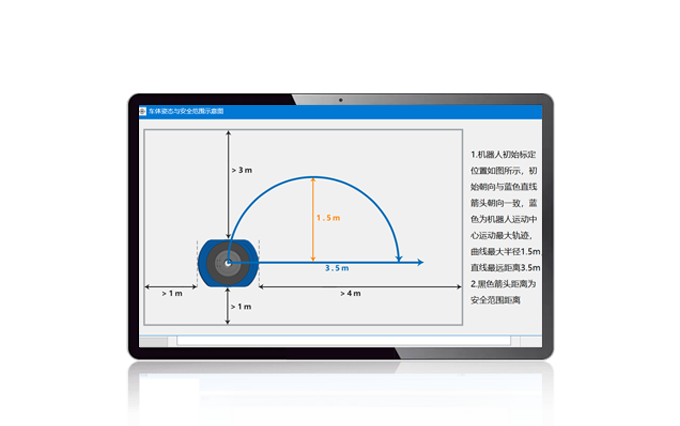
▌底盘配置——更直观易用
强大的底盘配置功能涵盖底盘结构、控制器结构、底盘运动参数以及驱动器配置等方面内容。
用户可以在工具右侧输入相关数值进行精准设置,与此同时,左侧会即时生成 2D 实时渲染示意图,实现轮距、车长车宽、设备位置等关键信息的同步更新,以便用户直观地查看和调整配置效果。

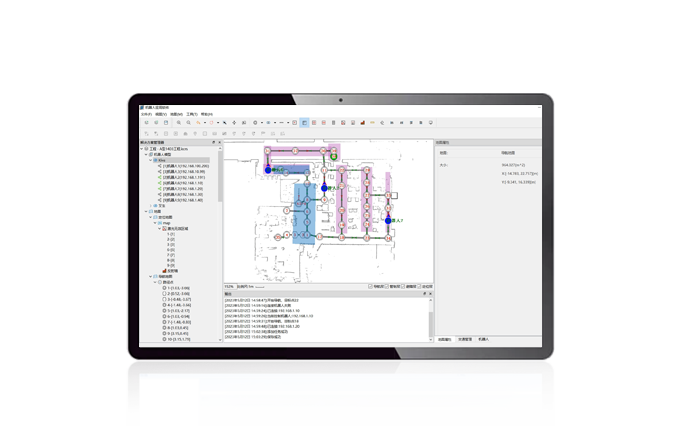
▌定位感知——更快速简单
用户可以自行决定是否启用二维码相机和激光雷达,启用后还可在海量的数据库中进行相应的型号选择。
此外,用户还可以通过输入数值来变更光雷达相关安装的位置。左侧的 2D 实时渲染示意图也能够实时呈现相应的效果,方便用户进行观测和调整,以达到最佳的配置状态。

▌安全防护——更全面自主
安全防护涵盖动力电源、急停信号、停止信号、制动信号、减速信号、触边信号等多个方面。
用户可以根据实际需求决定是否启用这些安全防护功能。
同时,用户能够在众多 variable 类型中选择自己心仪的信号通道参数,为设备的安全运行筑牢坚实的防护之墙。

▌应用功能——更精准方便
应用功能包含随动机构和顶升机构的相关配置。用户可以根据实际需求和具体场景,自行决定是否启用随动机构和顶升机构。
在信号通道参数的选择上,用户也能按照自己的意愿,从众多选项中挑选出最合适的参数。
此外,用户还可自行输入相关数值,对功能进行精细调整,以满足个性化的应用需求。

▌其他配置——更全面完备
用户在使用过程中,还可以自行决定是否启用电池 BMS。
在进行这一操作时,用户能够通过读取 variable.xml 文件,从中选择诸如充电状态、电池电压、电池电流、电池电量等变量。这些变量为用户提供了更全面、更精准的电池信息,以便用户更好地管理和监控电池的使用情况。

科聪“机器人模型组态向导”软件功能强大且独具特色,涵盖云端功能、海量 Variable 参数、底盘配置、定位感知、安全防护、应用功能以及其他配置等多个方面。在使用过程中,用户只需进行简单的输入数据和参数选择,即可实时看到可视化的效果。
便捷的操作方式极大地节省了用户的时间,让用户无需在复杂的操作流程中耗费精力。同时,软件的高易用性使得用户无需经过大量培训或费力翻看说明书就能轻松上手,大大提高了生产效率,让移动机器人软件设计变得更快速而简单,将为用户带来全新的高效设计体验。


