
















































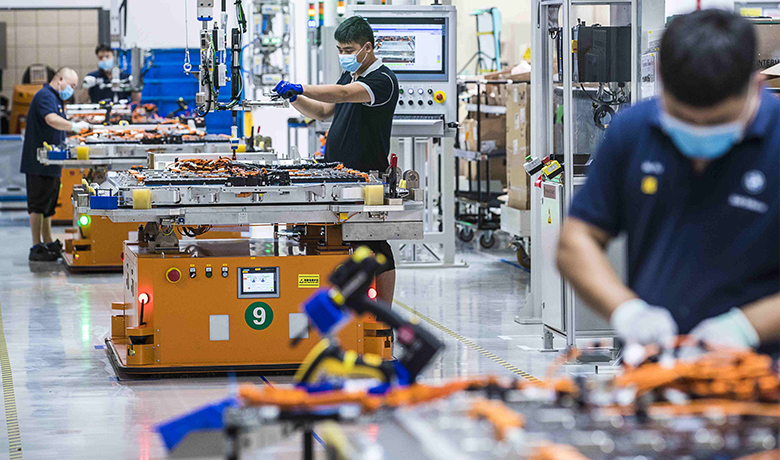






足式机器人在复杂地形作业中常面临三大挑战:地形适应难——崎岖路面行走易失稳;自主导航能力弱——动态环境定位易漂移;负载续航时长短——任务执行效率受限。尤其在野外探测、应急消防等场景中,传统机器人常因地形复杂、定位偏差或续航不足而难以完成任务,亟需更智能、更可靠的解决方案。
足式机器人的“智慧大脑”
KC SOLUTION
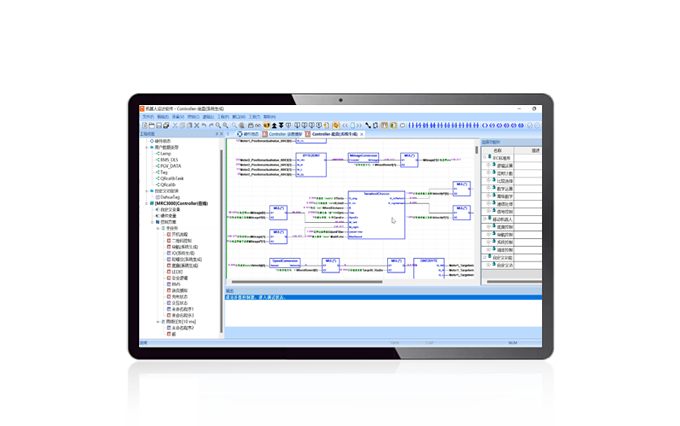
全地形步态控制,稳如磐石
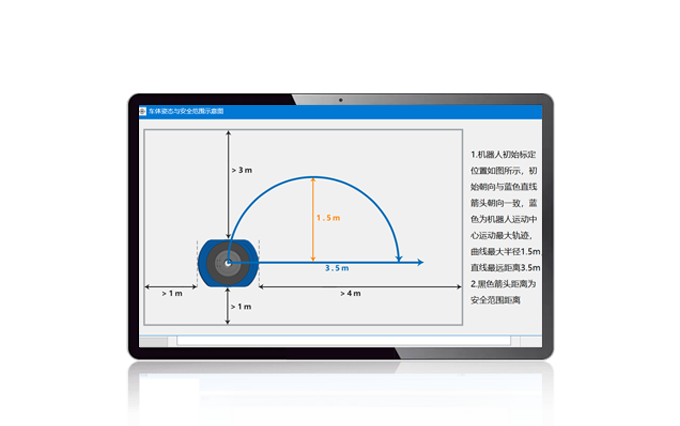
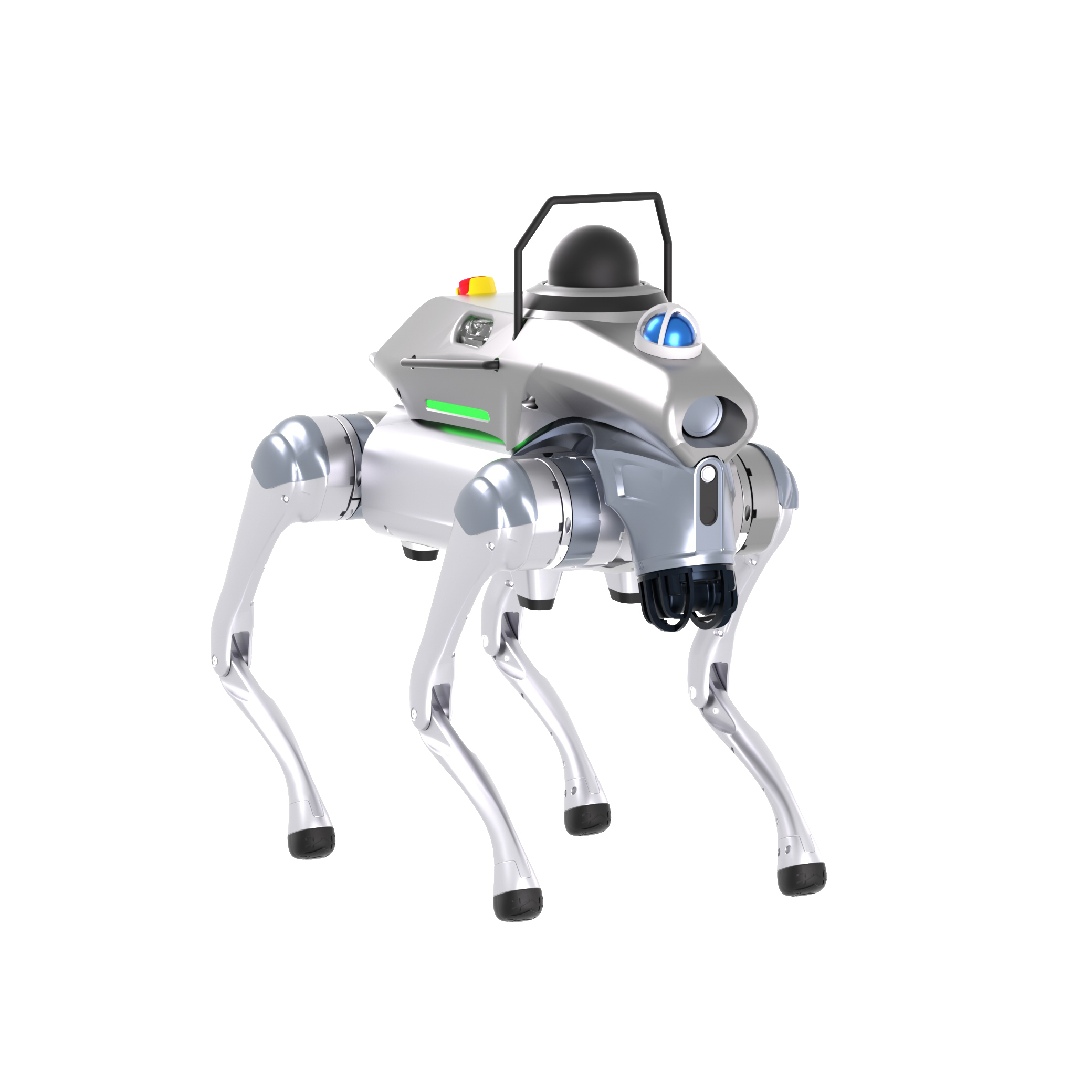
科聪足式机器人控制器MRC5000-U由科聪与杭州行思无界科技联合研发,内置足式机器人专用运动控制算法,精准协调六足18自由度关节运动,支持攀爬40°斜坡,即使仅三点着地也能保持机身零颠簸。通过三级安全设计,确保机器狗能够在碎石、泥泞等极端地形中稳定作业。

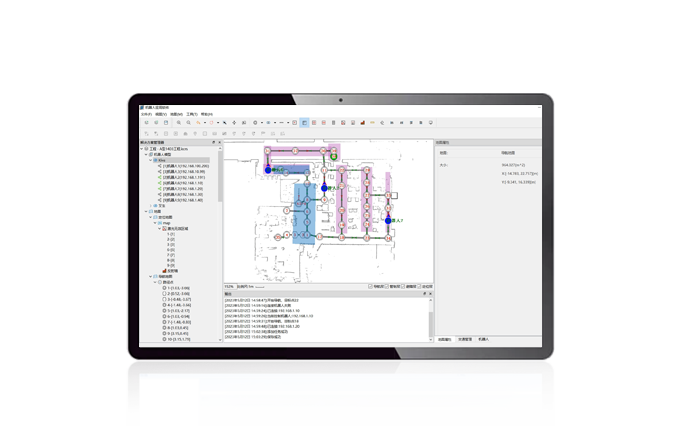
室内外无缝导航,精准无界
融合3D激光SLAM+GNSS RTK定位导航算法,定位精度达±10mm,支持100万㎡地图覆盖。无论是在单一场景还是多种复杂场景下,都可通过多传感器融合实时构建环境模型,动态避障响应时间<0.1秒,适应全天候、全场景任务需求。

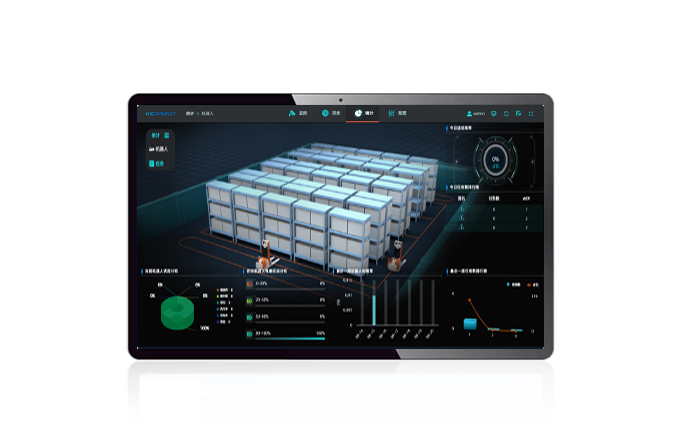
开放平台+超强负载,赋能多元场景
科聪足式机器人控制器提供标准化硬件接口(CAN/RS485等)及二次开发平台,可与各种传感器设备无缝连接,匹配多元化场景中的扩展应用需求。搭配科聪六足机器狗10kg强负载能力与2小时超长续航,可灵活应用于特种巡逻、野外探测、应急消防、科研勘探、导览导引等场景,大幅提升任务效率。




© 2023 浙江科聪控制技术有限公司官网 | 让移动机器人服务人类 浙公网安备 33052302000842号 浙ICP备20017983号-1 sitemap.xml