
































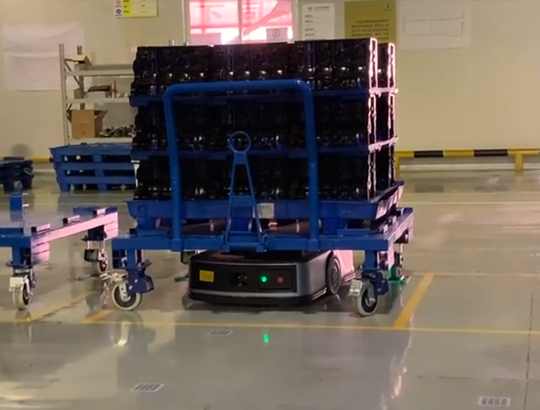












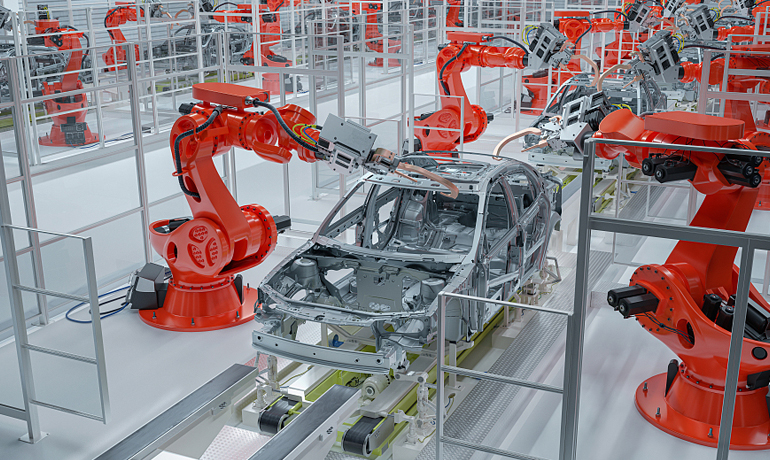

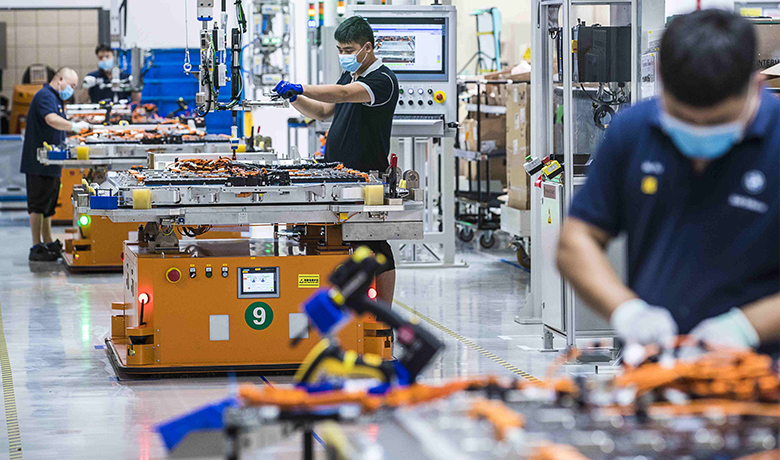












推荐适用类型

装载机

压路机

接驳车

环卫车
基本参数
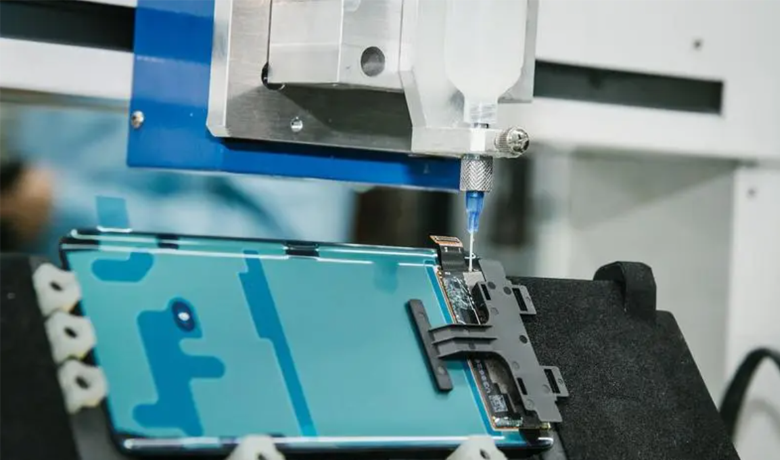
型号 | IVC6000 |
描述 | 低速无人驾驶控制器 |
尺寸 W x H x D(mm) | 250 x 194 x 50 |
防护等级 | IP65 |
温度 | -40℃~+70℃ |
湿度 | 10%~90%RH 无凝露 |
EMC | 工业三级 |
IMU | √ |
CAN(通道) | 4路,支持CANopen、J1939协议 |
RS485/RS232/RS422(通道) | 4/×/× |
PWM(通道) | 8(与8路DO复用) |
AI/AO | 4/× |
DI/DO | 16/16 |
有线工业以太网 | 6 |
激光导航 | √ |
GNSS导航 | 内置GNSS定位:支持北斗、支持RTK |
其他导航方式 | 选配 |
差速底盘运动模型 | √ |
舵轮底盘运动模型 | √ |
其他底盘运动模型 | 阿克曼底盘、铰接式底盘、履带式底盘等 |
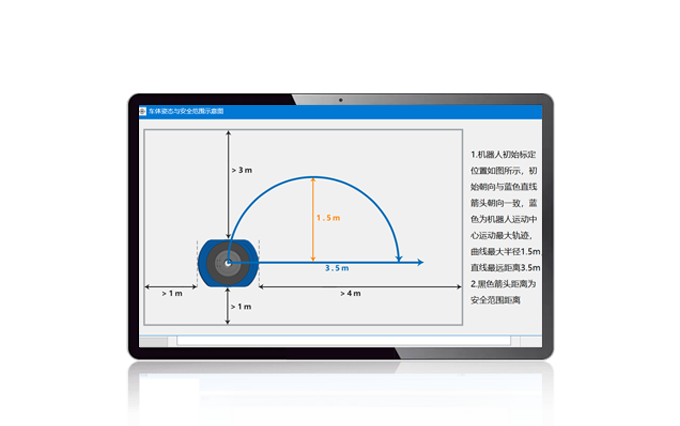
导航定位精度 | ±5cm |
角度控制精度 | ±1° |
地图面积 | ≤400000㎡ |
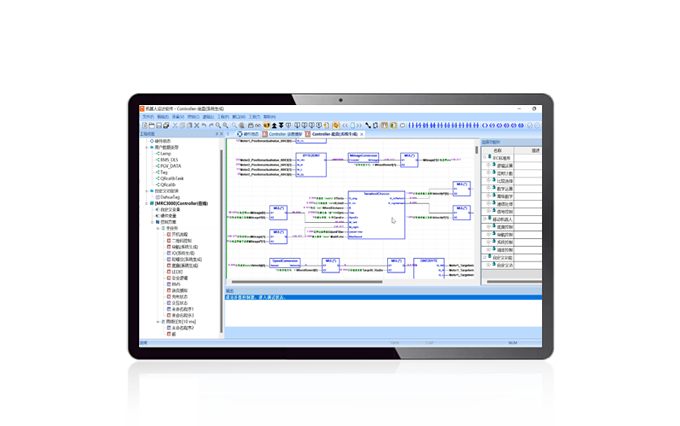
机器人设计软件 | √ |
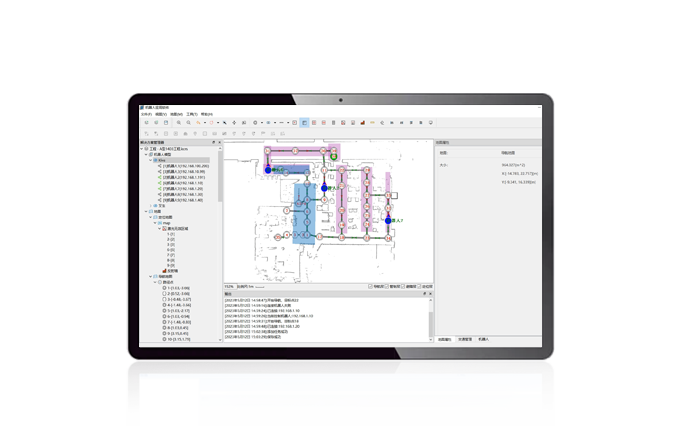
机器人应用软件 | √ |
机器人监控及调度软件 | 选配 |

© 2023 浙江科聪控制技术有限公司官网 | 让移动机器人服务人类 浙公网安备 33052302000842号 浙ICP备19001570号-1 sitemap.xml