






















































行业痛点直击
KC SOLUTION
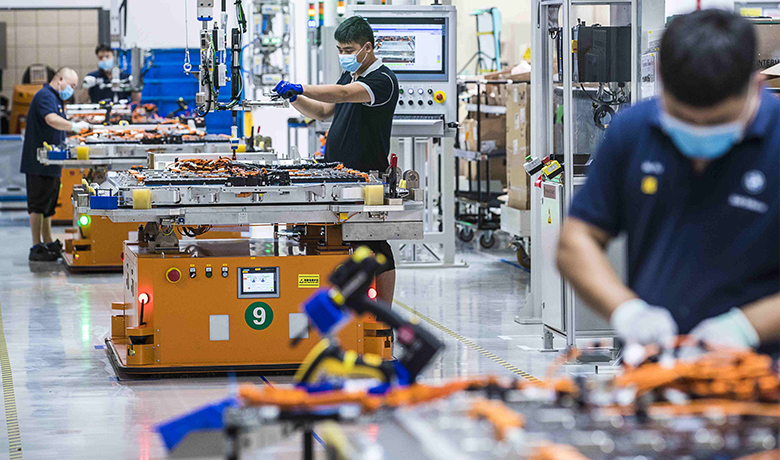
室内移动机器人在复杂工业环境中面临诸多挑战,尤其是在高动态环境下,货物等环境特征变化会显著降低定位的稳定性和准确性。例如,在周转率非常高的大型仓库中,频繁变动的货物、设备及人员会影响环境特征匹配的稳定性,会降低长期稳定准确识别路径的鲁棒性。
科聪顶视导航技术以广泛的适用性,能够满足此类场景室内场景的应用。搭载科聪顶视导航技术的移动机器人,在面对复杂动态变化的环境时,高效、精准的顶视定位导航,显著提高移动机器人的工作可靠、稳定的鲁棒性。

科聪顶视导航方案
KC SOLUTION
▍ 多维环境感知与快速部署
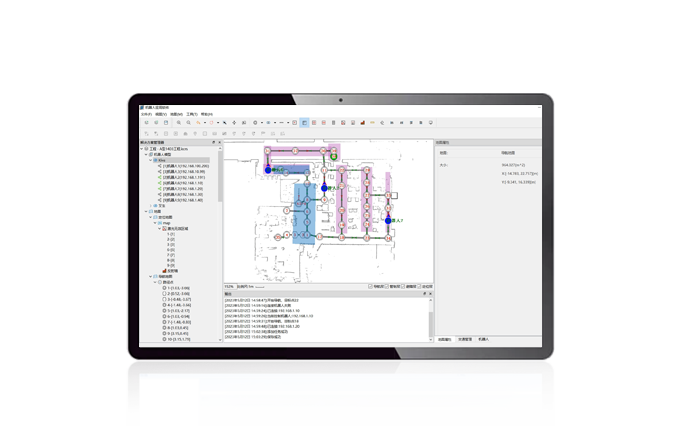
考虑到顶部环境特征相对稳定且不易改变,科聪顶视导航算法通过顶部视角快速扫描并构建三维地图,无需额外铺设标识。通过AI算法,对传感器数据深度融合,自动识别环境中的各种特征点,进行虚拟现实数字化还原。在动态变化频繁的车间或物体遮挡多的仓库中,系统具备高鲁棒性的环境感知和定位服务,确保复杂环境下的作业稳定性。

▍ 智能特征提取与位姿校准
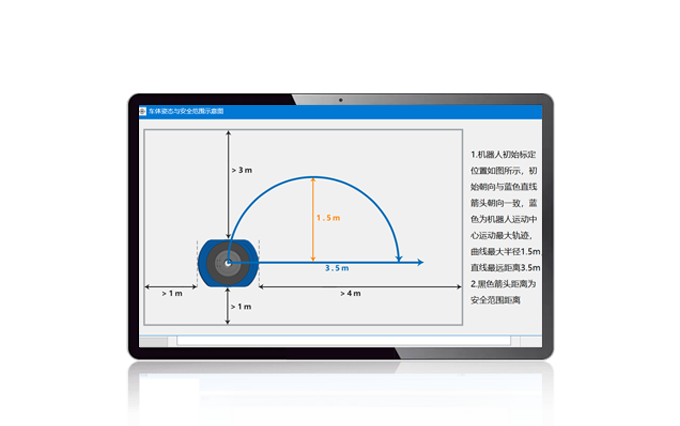
即使面对部分环境特征不太明显的顶部场景,得益于深度学习算法,提取顶部环境特征,计算机器人自身位姿,顶视导航定位方案支持重复定位精度达到±1cm,支持房顶距离激光高度可达到20米。这种导航方式不仅能够很好地适应静态场景,也能应对动态变化的环境,从而确保地图信息的实时更新和准确性。无论是在工厂车间、仓库货架,该系统都能高效运作。

浙江科聪顶视导航算法以其独特的技术优势,提升了定位导航技术的应用鲁棒性,包括高动态环境更高的定位可靠性和更高的稳定性、更棒的定位精度等,更为物流自动化带来了前所未有的灵活性和可靠性。作为行业领先的技术创新者,浙江科聪致力于持续探索,不断优化产品性能,为客户提供更加高效、智能的解决方案,共同推动智能制造迈向新高度。未来,我们将继续加大研发和AI+应用技术的投入,拓展更多应用场景,助力行业发展。



